|
3.如图所示是一款充电式电动小锤,使用时小锤利用振动敲入钉子。从人机关系的角度分析,下列说法中不正确的是

A.锤头角度调节方便,实现了高效目标
B.利用振动敲钉子,避免敲伤手,实现了安全目标
C.手柄的大小合适,考虑了人的静态尺寸
D.没有电线,适用于更多场合,主要考虑了人的动态尺寸
【答案】D
【解析】
A选项锤头角度调节方便,快速高效,符合人机关系的高效目标,故A选项正确;
B选项锤子的工作特点可以有效避免伤到人手,不会给人带来身体上的伤害,实现了安全目标,故B选项正确;
C选项手柄大小合适,要考虑手的大小来设计手柄的大小,即要考虑人的静态尺寸,故C选项正确;
D选项,实现合理的人机关系中要考虑人的动态尺寸是指设计时要考虑到人的肢体器官的活动幅度的大小和完成具体动作或者活动需要的空间的大小,电动小锤没有电线可自由移动,适合于更多场合,仅说明使用方便,与人的动态尺寸并无直接关系。故D选项错误。
故本题答案为D。
【考点】人机关系实现的目标、实现合理的人机关系要考虑的因素
4.如图所示是一款具有杀菌功能的床铺除尘机器人。下列关于该机器人的设计分析和评价中不正确的是

A.操作简单,使用方便.主要考虑了人的因素
B.有杀菌除尘功能,符合设计的实用原则
C.因在床铺上使用,设计时机器人的机身高度不受限制
D.能识别床铺的边沿,不会掉落,考虑到了环境的因索
【答案】C
【解析】
A,B比较明显,能够非常简单的判断出来;
C选项设计时机器人的机身高度不受限制,从生活常识来说很明显是错的,我们用极限的思维去考虑,如果这个机器人的机身高度高到能顶住天花板,那这个机器人很明显就不能使用了,这样就能非常方便的理解了,故C选项错误;
D选项,该机器人是在床铺上使用的,所以床铺就是其工作场所,而床沿就是去工作区域的边界,该机器人具有能识别床沿而不会掉落,很明显就是为其工作环境考虑的,故D选项正确。
故本题答案为C。
【考点】设计分析的三要素、设计的一般原则
5.图中漏标的尺寸共有
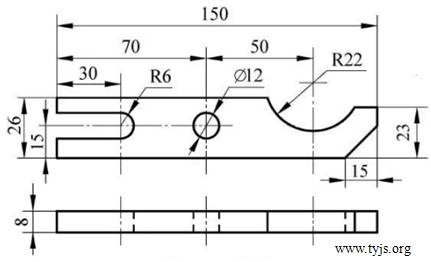
第5、6题图
A.1处 B.2处 C.3处 D.4处
【答案】B
【解析】
根据尺寸标注规则,圆、(包括)圆弧的尺寸在标注时要考虑其圆心的位置,而圆心的位置在标注的时候需要两个尺寸数字,通过观察可知图中R22的圆弧的圆心到图形下边的尺寸是没有标注的,是1处漏标;另主视图中右下角斜线的长度没有标注,所以是第2处漏标。
故本题答案为B。
【考点】尺寸标注
6.通用技术实践课上,小明准备用160mm×45mm×8mm的钢板加工该零件,下列说法中不正确的是
人.可用半圆矬来锉削加工R22的圆弧
B.加工流程可以为:划线→冲眼→钻孔→锯割→锉削
C.为防止钻屑伤手.在台钻上钻孔时要戴手套
D.加工中需要用到钢直尺、钢锯,划规、麻花钻
【答案】C
【解析】
根据金工钻孔的操作要领“两要两不要”可知,在钻孔的时候不能带手套,防止手套被旋转的钻头卷入而引起受伤。故C选项错误。该知识点是钻孔操作必须掌握的知识点,日常上课过程中都会频繁的强调,另外该知识点在课本中是以阅读材料的形式出现的,所以也提醒同学们在复习的过程中要注意全面性,尤其是回归课本,关注细节。
故本题答案选C。
【考点】金工工艺
7.如图所示是一种结构对称的增力机构。在较小的推力F作用下,推杆通过连杆和摆杆带动顶杆运动.能克服较大的工作阻力P。下列受力形式分析中正确的是
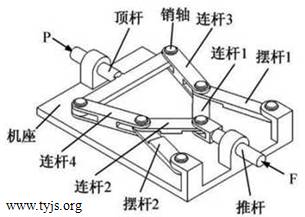
A.连杆1受拉、摆杆1受拉、推杆受弯曲
B.连杆1受压、摆杆1受拉、推杆受压
C.连杆1受压、摆杆1受压、推杆受弯曲与受压
D.连杆1受压、摆杆1受压、推杆受压
【答案】D
【解析】
根据题目描述和图示,可以看出,在力F的作用下,推杆往里伸入,通过连杆1和连杆2的作用推动并使摆杆1和连杆3、摆杆2和连杆4的连接部分伸直,从而将顶杆往里伸入,可以看出推杆、连杆1、摆杆1都是因推而发生了位置的变化,所以推杆、连杆1、摆杆1都是受压。所以本题答案为D。
【考点】构件的受力分析
|