|
7.如图所示是一种结构对称的夹持工具,C与C’、G与G’为支点。在推力F作用下,可以牢固地夹持物块并使物块表面受力均匀。在F外力作用下,杆2、杆3、杆4、杆5的受力形式分析正确的是[通用技术网]
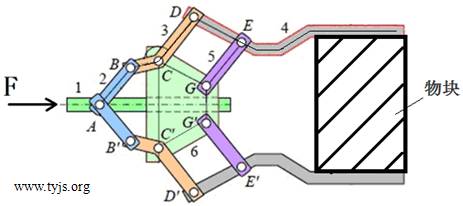
A.杆2受拉、杆3受弯曲、杆4受弯曲、杆5受拉
B.杆2受压、杆3受弯曲、杆4受弯曲、杆5受拉
C.杆2受拉、杆3受弯曲、杆4受扭转、杆5受弯曲
D.杆2受压、杆3受扭转、杆4受弯曲、杆5受压
8.如图所示的移动式骑马健身机,该健身机由底座、支架、活动杆等组成。健身时人坐在坐垫上,双手拉扶杆,双脚蹬踏板,则摆动杆做逆时针方向转动,并带动坐垫离开立柱向上提升。关于该骑马机,下列说法不正确的是[通用技术网]
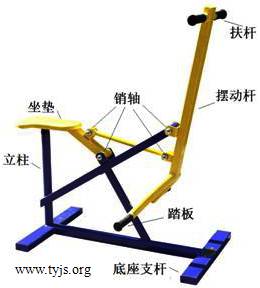
A.延长底座支杆的长度,可以提高其稳定性
B.增加立柱的直径和壁厚,可以提高其强度
C.提升立柱高度,有利提高其强度
D.健身时,销轴的主要受力形式是受剪切
如图所示为大棚湿度控制系统示意图,该系统由大棚、湿度传感器、数显控制器、大棚增湿器等组成。湿度传感器将检测到的棚内空气湿度转换成电信号传输给数显控制器,与湿度设定值进行比较,当检测到的湿度低于设定值的下限时,数显控制器发出信号,大棚增湿器工作,向大棚喷送高湿气体。当检测到的棚内空气湿度高于设定值的上限时,数显控制器发出信号,大棚增湿器停止工作,从而达到自动控制棚内空气湿度的目的。请根据9〜10题图及其描述,完成9〜10题。
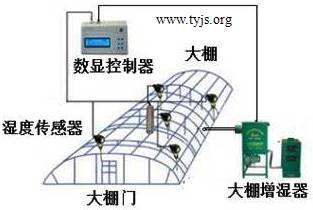
9. 从系统角度分析,下列分析中正确的是
A.大棚增湿器的功率须与大棚的容积相匹配,体现了系统的环境适应性
B.大棚增湿器出现故障,会影响到大棚的湿度稳定,体现了系统的相关性
C.随时间的推移,大棚密闭性能下降,体现系统的动态性
D.数显控制器通过对比分析,并发出决策信号,体现了系统分析的科学性原则
10.该湿度控制系统,控制量为
A.设定的湿度 B.数显控制器发出的信号
C.大棚增湿器向大棚的送气量 D.大棚的实际湿度
11.如图所示的控制电路,V1为硅基三极管,LED灯发光时的压降为1.8v。当该电路中的LED灯发光时,下列说法正确的是
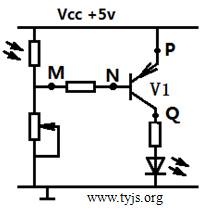
A.N点电位约为4.3v
B.P、Q两点的电位差约为4.3v
C.Q点的电位不可能高于N点
D.N点的电位不可能高于M点
12.如图所示的电路,用以控制L1、L2。初始时,S1、S2都处于断开状态,下列分析不正确的是
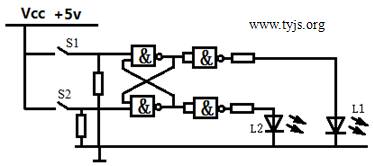
A.只按下S1时,L1亮 B.只按下S2时,L2亮
C.S1、S2都按下时,L1、L2都亮 D.S1、S2都不按时,L1、L2都不亮
13.如下图所示的光控灯电路,当光线暗到一定程度时,继电器J吸合,路灯L1亮。555的输入输出关系如图乙所示。关于该光控灯电路,下列说法不正确的是
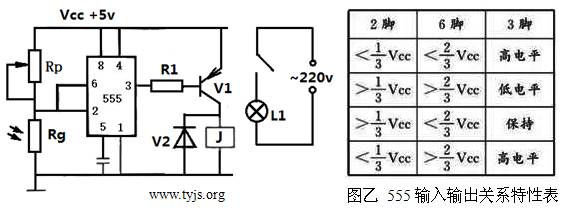
A.调试时灯L1永远不亮,故障的可能原因是R1太大。
B.想要在傍晚时,灯L1早一点发光,可调大电阻Rp。
C.V2的作用是保护三极管V1
D.光照越强,Rg的阻值越小
|